발사 및 착륙 :
1. 발사 : 로버는 로켓 꼭대기에 우주로 발사되며, 종종 궤도 나 진입 차량과 같은 다른 우주선 구성 요소와 함께 실행됩니다.
2. 화성으로 크루즈 : 우주선은 화성을 향한 공간을 통해 수백만 킬로미터를 여행하며, 종종 몇 달 또는 몇 년을 통과하는 데 소비합니다.
3. 진입, 하강 및 착륙 (edl) : 화성에 도착하자마자 우주선은 지구의 대기로 고속으로 들어갑니다. 에어로 브레이킹, 낙하산 및 retrorockets는 차량 속도를 늦추는 데 사용됩니다. 마지막으로, 로버는 스카이 크레인 또는 다른 착륙 시스템을 사용하여 표면으로 부드럽게 낮아집니다.
발전 및 스토리지 :
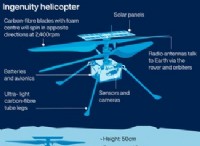
1. 태양 전지판 : 화성 로버는 일반적으로 태양 에너지로 구동됩니다. 로버 바디의 태양 전지판은 햇빛을 포착하여 전기로 변환합니다.
2. 방사성 동위 원소 열전 발전기 (RTGS) : RTG는 방사성 재료의 붕괴를 통해 전기를 생성하는 원자력 전력 공급원입니다. 그들은 특히 화성의 밤 또는 조명 조건에서 신뢰할 수 있고 일관된 전원 공급 장치를 제공합니다.
이동성 및 내비게이션 :
1. 바퀴 : 대부분의 화성 로버에는 6 개의 바퀴가 장착되어있어 모든 지형 이동성과 거친 화성 지형을 가로 지르는 능력을 제공합니다.
2. 서스펜션 시스템 : 로버는 독립적 인 휠 조음이있는 고급 서스펜션 시스템을 갖추고있어 장애물을 극복하고 고르지 않은 표면의 안정성을 유지하는 데 도움이됩니다.
3. 내비게이션 기기 : 로버는 카메라, 센서 및 고급 알고리즘의 조합을 사용하여 화성 환경을 가로 질러 자율적으로 탐색합니다. 카메라는 이미지를 캡처하고 온보드 컴퓨터는 이러한 이미지를 분석하여 지형을 매핑하고 로버의 경로를 계획합니다.
과학 기기 :
화성 로버에는 화성 환경, 지질학 및 잠재적 거주 성을 연구하기위한 다양한 과학 도구가 장착되어 있습니다. 이 기기에는 다음이 포함될 수 있습니다.
1. 카메라 : 로버에는 파노라마 이미지를 촬영, 클로즈업 캡처 및 표면 기능을 문서화하기위한 고해상도 카메라가 있습니다.
2. 분광기 : 이 기기는 스펙트럼 특성을 감지하고 측정하여 암석, 토양 및 대기 가스의 화학적 구성을 분석합니다.
3. 현미경 : 로버는 미세한 이미징 기기를 운반하여 매우 근거리에서 샘플을 검사하여 상세한 표면 텍스처 및 구조를 나타냅니다.
4. 드릴 및 샘플 수집 도구 : 일부 로버에는 탑승 또는 나중에 지구로 돌아 오기 위해 암석 및 토양 샘플을 추출하기위한 훈련이 장착 된 로봇 암이 있습니다.
5. 환경 센서 : 로버는 온도, 압력, 습도 및 기타 대기 조건을 측정하기 위해 도구를 운반합니다.
지구와의 의사 소통 :
1. 무선 통신 : 로버는 우주선의 강력한 안테나에 의해 전송되는 무선 신호를 통해 주로 지구와 통신합니다.
2. 궤도 릴레이 : 화성 궤도는 또한 로버와 지구 사이의 신호를 전달하여 의사 소통 기회가 증가 할 수 있습니다.
데이터 분석 :
1. 온보드 처리 : 로버에는 수집 된 데이터 중 일부를 자율적으로 분석 할 수있는 온보드 컴퓨터가있어 이동 장소와 다음에 조사 할 내용에 대한 결정을 내릴 수 있습니다.
2. 지구 기반 분석 : 대부분의 데이터는 과학자와 연구원들이 화성 환경과 역사를 이해하기 위해 그것을 분석하는 지구로 다시 전송됩니다.
도전 :
화성에서 운영하는 것은 가혹한 환경 조건, 지구와의 거리, 자원 제한 및 자율적 의사 결정의 필요성을 포함한 많은 어려움을 제시합니다.
이러한 도전에도 불구하고, Mars Rovers는 Red Planet을 성공적으로 탐구하여 지질학, 기후 및 과거 또는 현재의 삶에 대한 잠재력에 대한 귀중한 통찰력을 제공했습니다. 그들은 또한 미래의 인간 임무를 화성에 대한 무대를 설정했습니다.