최초의 화성 로버 인 Sojourner는 1997 년에 시작하여 1994 년 화성에 상륙했습니다. Sojourner는 무게가 약 11 킬로그램 (24 파운드) 인 작은 로버였습니다. 카메라, 분광계 및 알파 입자 X- 선 분광계가 장착되었습니다. Sojourner는 임무 기간 동안 약 100m (328 피트)를 여행했습니다.
두 번째 화성 로버 인 Spirit은 2003 년에 시작하여 2004 년 화성에 상륙했습니다. Spirit은 약 185 킬로그램 (407 파운드)의 무게를 가진 Sojourner보다 훨씬 큰 로버였습니다. 카메라, 분광계, 현미경 및 암석 마모 도구를 포함한 다양한 악기가 장착되었습니다. 정신은 임무 기간 동안 7km (4.3 마일) 이상 여행했습니다.
세 번째 화성 로버 인 Opportunity는 2003 년에 시작하여 2004 년 화성에 상륙했습니다. 기회는 약 185 킬로그램 (407 파운드)의 무게로 정신과 비슷했습니다. 또한 비슷한 악기 세트가 장착되었습니다. 기회는 임무 기간 동안 45km (28 마일) 이상을 여행했습니다.
네 번째 화성 로버 인 Curiosity는 2011 년에 시작하여 2012 년 화성에 상륙했습니다. Curiosity는 가장 크고 가장 진보 된 화성 로버입니다. 무게는 약 899 킬로그램 (1,982 파운드)이며 카메라, 분광계, 현미경, 암석 마모 도구 및 드릴을 포함한 다양한 악기가 장착되어 있습니다. 호기심은 임무 기간 동안 23km (14 마일) 이상 여행했습니다.
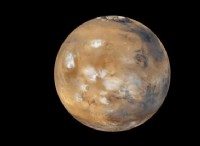
화성 로버는 화성에 대한 우리의 이해에 크게 기여했습니다. 그들은 우리에게 화성 환경의 이미지, 지구의 지질학에 대한 데이터 및 기후와 분위기에 대한 통찰력을 제공했습니다. 로버스는 또한 화성의 역사와 지구상의 생명의 잠재력에 대해 더 많이 배우는 데 도움이되었습니다.
다음은 Mars Rovers의 작동 방식에 대한 자세한 내용입니다.
* 파워 : 화성 로버는 태양 전지판으로 구동됩니다. 태양 전지판은 햇빛을 모아 전기로 변환합니다. 이 전기는 로버의 악기와 시스템에 전원을 공급하는 데 사용됩니다.
* 이동성 : 화성 로버에는 화성 표면 주위를 움직일 수있는 바퀴가 장착되어 있습니다. 로버는 지구에서 원격으로 구동 될 수 있거나 자율적으로 운전하도록 프로그래밍 할 수 있습니다.
* 감지 : 화성 로버에는 화성 환경을 연구 할 수있는 다양한 센서가 장착되어 있습니다. 이 센서에는 카메라, 분광기, 현미경 및 암석 마모 도구가 포함됩니다.
* 커뮤니케이션 : 화성 로버는 무선 파도를 통해 지구와 통신합니다. 로버는 데이터와 이미지를 다시 지구로 보내고 지구에서 명령을받습니다.
화성 로버는 화성에 대한 우리의 이해에 혁명을 일으킨 놀라운 기계입니다. 그들은 우리의 태양계의 다른 것과는 다른 세상을 엿볼 수있었습니다.