우리는 두 호환 전류 운반 케이블 사이의 단위 길이 당 전력이 FL =2μi1I24πr에 의해 제공된다는 것을 알고 있습니다. i1 =전류가 도체 1, r =도체 1과 2 사이의 거리로 흐릅니다. i2 =현재 도체에서 흐르고 있습니다.
r =1m 우리는-fl =μ4π × 2 × 1 × 1을 얻는다.
따라서이 경우 두 힘은 반대 방향으로 작동합니다. 그래서 우리는 그들이 역겨운 것이라고 말할 수 있습니다. 그러므로 우리는 두 도체의 전류가 서로 평행하게 설정되면 지휘자에 작용하는 전력은 무시할 수 있다고 결론을 내릴 수 있습니다.
이론
그림
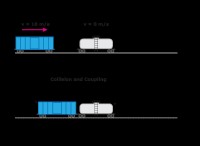
에 표시된 것처럼 각각 전류를 위쪽으로 운반하는 2 개의 직선 연속 도체 인 별도의 거리를 고려하십시오.
현재 담당하는 두 개의 병렬 도체는 전류가 같은 방향에 있으면 서로 강력한 힘을 가할 것입니다.
첫 번째 와이어는 와이어를 중심으로 한 원 모양 인 자기장 BA를 생성합니다. 두 번째 전화의 경우 자기장 B1이 페이지에 있고 크기는 다음과 같습니다.

실제로 두 번째 전화에 동일한 전력과 전원이 적용됩니다. 따라서 두 개의 평행 와이어가 같은 방식으로 와이어를 운반 할 때 서로를 끌어들이는 동일하고 반대 강도를 사용합니다.
동일한 두 전류를 고정하는 도체 사이를 누릅니다
우리는 현재 운영자와 BIOT - Savart Law로 인한 자기장의 존재에 대해 배웠습니다.
우리는 또한 외부 자기장이 시스템을 제어하는 현재 도체와 Lorentz 전력 공식에 전력을 발휘한다는 것을 알게되었습니다.
따라서,이 두 연구에서, 우리는 서로 옆에 배치 될 때 전류를 보유하는 두 개의 도체가 서로에게 자기력을 적용 할 것이라고 말할 수 있습니다. 이 섹션에서는이 사례에 대해 자세히 자세히 알아볼 것입니다.
동일한 두 개의 전류를 고정하는 도체 사이를 누릅니다
위의 다이어그램에 표시된 다이어그램을 고려하십시오. 여기에는 d로 분리 된 2 개의 병렬 도체 전류가 있습니다. 앞에서 얻은 정보에서, 도체 2는 도체 1으로 인해 길이로 모든 방향으로 동일한 자기장을 만났다고 말할 수 있습니다. 자기장 방향은 그림에 표시되며 6 번째 피드 법칙을 사용하여 얻습니다. 우리가 볼 수 있듯이 자기장의 방향은 첫 번째 드라이버로 인해 거꾸로 뒤집 힙니다.
암페어 란?
Ampere는 프랑스 물리학 자와 수학자 Andre-Marie Ampere의 이름을 따서 명명되었습니다. 하나의 전류 암페어는 단일 쿨롱 전기 충전기, 즉 1 초 안에 이동하는 6.24 × 1018 충전 캐리어를 나타냅니다. 다시 말해, 암페어는 단일 옴 저항에서 작동하는 단일 전압의 전력에 의해 생성되는 전류입니다.
암페어는 초당 1 쿨롱의 흐름과 동일한 현재 전기 단위로 정의됩니다.
암페어와 쿨롱의 관계는 다음과 같이 표현됩니다.
Ampere =1 Coulomb / Second
현재 환경에서 언제든지 이동하는 입자를 통과하는 입자에 대한 전하가 증가하면 암페어의 값이 동일하게 증가합니다.
암페어는 무엇을 의미합니까?
19 세기 프랑스 물리학 자 안드레 마리 암페르 (André-Marie Ampère)의 이름을 따서 초당 하나의 전기 쿨롱의 흐름을 나타냅니다. 하나의 암페어의 흐름은 하나의 볼트의 전위차와 하나의 옴의 저항에 의해 생성됩니다. Ampere, Symbol A는 전류의 Si 단위입니다. 이 정의의 의미는 전기 에너지의 하나의 암페어가 초당 1 / (1.602 176 634 x 10–19)의 기본 비용 흐름을 동반한다는 것입니다.
.암페어 당 최대 토크
각 PERE 컨트롤의 최대 토크는 현재 단위 최대 출력 토크 제어라고도합니다. MTPA 컨트롤의 기본 개념은 고정자 전류 진폭에서 최대 토크를 출력 할 수있는 현재 작동 지점을 찾는 것입니다.
이 논문은 MTPA (연간 최대 토크) 제어 전략, 훌륭한 극 PMSM (영구 자석 동기 모터)을 설명하고 방전 약화 전략을 제어합니다. MTPA 전략을 제어하는 데 사용되는 동적 폴 PMSM 및 룩업에서 얻은 MTPA 곡선이 종종 테이블에서 사용되는 방식은 시스템의 실시간 성능과 신뢰성을 줄입니다. 이 논문에서는 항목 전기 토크와 관계 AC-DC 축 전류 ID IQ를 적절한 곡선과 정확한 경로로 얻을 수 있습니다. 이는 2 차원 선형 방정식 세트에서 원래 비선형 수치와 동일하며 오류 분석에 따르면 오류가 엔지니어링 요구와 일치하는 것으로 나타 났으므로 매우 쉽고 실제 성능에 도움이됩니다. 이를 바탕 으로이 논문은 또한 플럭스-가공 컨트롤러를 달성하기위한 위상 이동 제어 방식을 도입합니다. 시뮬레이션 및 시뮬레이션을 사용하여 분석 된 모터 제어 및 개선 된 알고리즘을 제어하기 위해 결과 결과는 진위와 알고리즘 및 이론을 확인합니다.
결론
상응하는 문자열은 반대 방향으로 이동하고 문자열은 서로 밀어냅니다. 와이어의 전류가 같은 방향으로 흐르면 와이어가 서로를 당깁니다. 그리고 전류가 반대 할 때 그들은 서로를 쫓아냅니다. 둘 사이의 힘은 무엇입니까
Ampere의 공식 정의는 다음과 같습니다. 하나의 전류 암페어는 다른 자기장이없는 진공에서 1 미터로 분리 된 무한 길이의 2 개의 해당 도체 각각을 사용하여 각 영역에서 정확히 2 × 10-7 n / m의 전력을 초래합니다. 드라이버 방향.



![새로운 아이리스 망원경 이미지 전례없는 세부 사항으로 태양을 이미지 [놀라운 사진]](/article/uploadfiles/202211/2022111014565832_S.png)

