유체 역학에서는 질량 흐름과 관련 밀도 변화(질량 보존)의 균형을 맞추는 방정식을 연속 방정식이라고 합니다.
1차원 흐름의 연속 방정식
경험에 따르면 질량은 무에서 생성될 수도 없고 소멸될 수도 없습니다. 수학적으로 이러한 흐름의 질량 보존은 소위 연속 방정식으로 공식화됩니다. .
유한체적요소의 질량유속
연속성 방정식을 도출하기 위해 먼저 매우 작은 체적 요소(제어 체적)를 고려합니다. 제어 볼륨의 길이는 Δx로 표시되며 너비 Δy와 높이 Δz를 갖습니다. 압축성 유체가 이 유한 체적 요소를 통해 흐릅니다. 유체는 측면을 통해 체적 요소에 들어가고 다른 표면을 통해 나갈 수 있습니다.
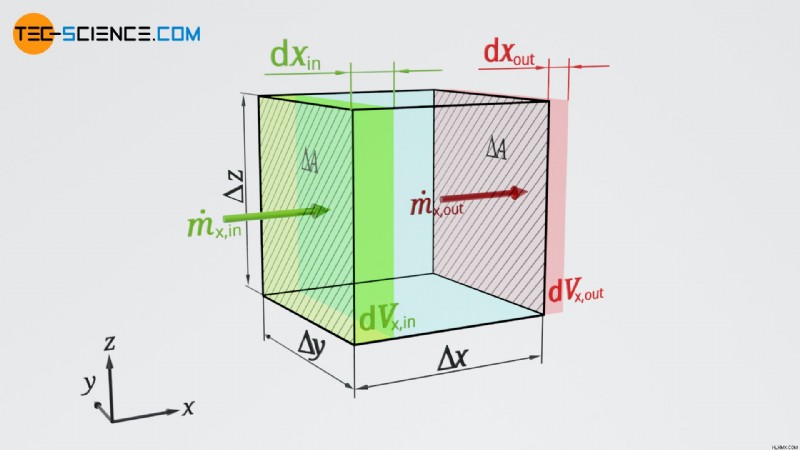 그림:질량 플럭스 도출을 위한 제어 볼륨
그림:질량 플럭스 도출을 위한 제어 볼륨 단순화를 위해 먼저 x 방향의 흐름만 고려하겠습니다. 극미한 시간 dt 내에 특정 질량 dmx,in이 체적 요소로 흘러 들어갑니다. 반대편에서는 특정 질량 dmx,out이 동시에 부피 요소를 떠납니다.
유입되거나 유출되는 질량은 흐름이 체적 요소로 들어가거나 나가는 속도에 따라 결정됩니다. 흐름이 속도 vx,in으로 체적 요소에 들어가면 시간 dt 내에 극소 거리 dxx,in=vx,in⋅dt를 이동합니다. 따라서 다음 볼륨 dVx,in이 제어 볼륨으로 흘러 들어갑니다.
\begin{정렬}
&\text{d}V_\text{x,in}=\Delta A \cdot \text{d}x_\text{x,in} =\Delta A \cdot v_\text{x,in} \cdot \text{d}t\\[5px]
\end{정렬}
극소 거리 dxx,ein을 고려하므로 유입량 내에서 일정한 밀도를 가정할 수 있습니다. 체적 요소로 들어가는 지점에서 유체의 밀도가 ϱx,in인 경우 유입 질량 dmx,in은 다음과 같이 계산됩니다.
\begin{정렬}
&\text{d}m_\text{x,in}=\text{d}V_\text{x,in} \cdot \rho_\text{x,in} =\Delta A \cdot \rho_\text{x,in} \cdot v_\text{x,in} \cdot \text{d}t \\[5px]
\end{정렬}
따라서 단위 면적당 제어 볼륨으로 흐르는 질량은 밀도와 속도에만 의존합니다. 이 영역별 질량 유량 \(\dot m^\text{*}\)은 질량 유속이라고도 합니다. 질량 유량과 더 잘 구분하기 위해 별표(*)가 표시되어 있습니다:
\begin{정렬}
&\dot m_\text{x,in}^\text{*} =\frac{\text{d}m_\text{x,in}}{\Delta A \cdot \text{d}t} =\rho_\text{x,in} \cdot v_\text{x,in} \\[5px]
\label{m_ein}
&\밑줄{\dot m_\text{x,in}^\text{*} =\rho_\text{x,in} \cdot v_\text{x,in}} \\[5px]
&\boxed{\dot m^\text{*} =\rho \cdot v}~~~\text{질량유속} \\[5px]
\end{정렬}
유체의 유동장에서 밀도와 유속의 곱을 질량유속이라고 합니다. 단위시간, 단위면적당 흐름방향으로 흐르는 질량을 나타냅니다!
압축성 유체의 경우 유동장의 밀도는 일반적으로 일정하지 않지만 일반적으로 지점마다 다릅니다. 예를 들어, 유체가 고려된 제어 볼륨에 축적되면 제어 볼륨 유출 시의 밀도와 유속은 제어 볼륨 유입과 달라집니다. 유출에서의 질량 유속은 유입에서의 질량 유속과 동일한 방식으로 계산됩니다[방정식 (\ref{m_ein}) 참조]:
\begin{정렬}
&\밑줄{\dot m_\text{x,out}^\text{*} =\rho_\text{x,out} \cdot v_\text{x,out}} \\[5px]
\end{정렬}
나가는 질량보다 제어 볼륨으로 더 많은 질량이 유입되면 내부 질량이 증가합니다(아래 애니메이션 참조). 제어 체적(CV)의 질량 변화율 \(\dot m_\text{CV}\)은 들어오고 나가는 질량의 차이로 인해 발생합니다(지수 x는 제어 체적의 질량 변화가 x 방향의 흐름으로 인한 것임을 나타냅니다. 나중에 y 및 z 방향의 흐름 구성 요소도 고려할 것입니다):
\begin{정렬}
\라벨{m}
&\underbrace{~~\dot m_\text{CV}~~}_\text{CV 내부 질량 변화} =\underbrace{~~\dot m_\text{x,in}~~}_\text{CV로 유입되는 질량} – \underbrace{~~\dot m_\text{x,out}~~}_\text{CV에서 유출되는 질량} \\[5px]
&\dot m_\text{CV} ~~=~~ \dot m_\text{x,in}^\text{*} \cdot \Delta A~~ -~~ \dot m_\text{x,out}^\text{*} \cdot \Delta A \\[5px]
&\boxed{\dot m_\text{CV} ~~=~~ \dot m_\text{x,in}^\text{*} \cdot \Delta y\cdot \Delta z~~ -~~ \dot m_\text{x,out}^\text{*} \cdot \Delta y \cdot \Delta z} \\[5px]
\end{정렬}
미소 부피 요소의 질량 유속
이제 질량 플럭스와 그에 따른 밀도와 속도의 곱이 x 좌표를 따라 변하는 압축성 흐름의 극소 체적 요소(제어 체적)를 고려해 보겠습니다. 따라서 이 x 좌표를 따라 질량 플럭스의 기울기 ∂(ϱ⋅vx)/∂x를 정의할 수 있습니다. 거리 dx(미소 부피 요소의 길이)에 걸쳐 질량 플럭스 \(\text{d} \dot m_\text{x}^\text{*}\)의 다음 변화는 x 방향을 초래합니다:
\begin{정렬}
&\underline{\text{d} \dot m_\text{x}^\text{*} =\frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}x} ~~~~~\text{질량 플럭스의 변화 } \text{d}x \\[5px]
\end{정렬}
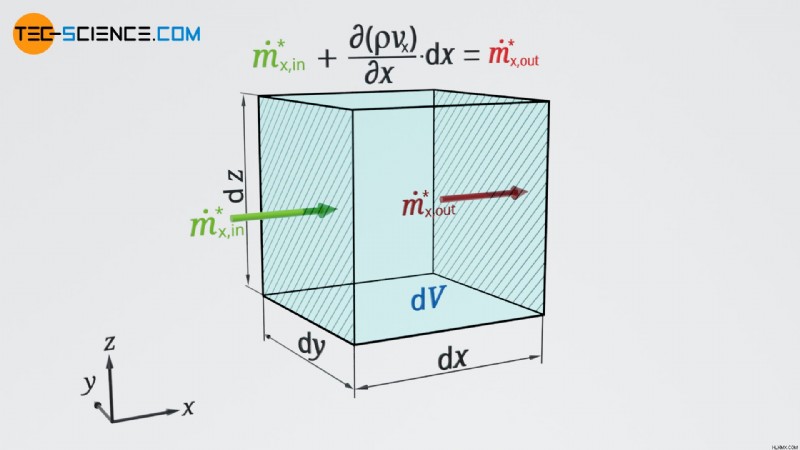 그림:제어 볼륨에서 질량 흐름의 균형 조정
그림:제어 볼륨에서 질량 흐름의 균형 조정 제어 볼륨의 유출 시 질량 유속은 다음과 같이 결정됩니다.
\begin{정렬}
&\dot m_\text{x,out}^\text{*} =\dot m_\text{x,in}^\text{*} +\text{d} \dot m_\text{x} \\[5px]
&\underline{\dot m_\text{x,out}^\text{*} =\dot m_\text{x,in}^\text{*} + \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}x} ~~~~\text{유출되는 질량 플럭스}\\[5px]
\end{정렬}
제어 볼륨 내부의 결과적인 시간적 질량 변화 \(\dot m_\text{CV}\)는 방정식(\ref{m})으로 결정될 수 있으며, 이 시점에서 극소 치수 dy 및 dz가 사용됩니다.
\begin{정렬}
\요구{취소}
&\dot m_\text{CV} =\dot m_\text{x,in}^\text{*} \cdot \text{d}y \cdot \text{d}z ~~~ \dot m_\text{x,out}^\text{*} \cdot \text{d}y \cdot \text{d}z \\[5px]
&\dot m_\text{CV} =\dot m_\text{x,in}^\text{*}\cdot \text{d}y \cdot \text{d}z ~~~ \left(\dot m_\text{x,in}^\text{*}+ \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}x \right) \cdot \text{d}y \cdot \text{d}z \\[5px]
&\dot m_\text{CV} =\cancel{\dot m_\text{x,in}^\text{*}\cdot \text{d}y \cdot \text{d}z} ~~~ \cancel{\dot m_\text{x,in}^\text{*} \cdot \text{d}y \cdot \text{d}z}~-~ \frac{\partial(\rho v_\text{x})}{\partial x} \cdot \text{d}x \cdot \text{d}y \cdot \text{d}z \\[5px]
&\dot m_\text{CV} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \underbrace{\text{d}x \cdot \text{d}y \cdot \text{d}z}_{\text{d}V} \\[5px]
\라벨{a}
&\밑줄{\dot m_\text{CV} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}V } \\[5px]
\end{정렬}
음의 부호는 양의 기울기의 경우 체적 요소의 질량이 시간이 지남에 따라 감소한다는 것을 나타냅니다. 왜냐하면 분명히 나가는 질량 흐름이 들어오는 질량 흐름보다 크기 때문입니다. 그러나 부피 요소의 질량이 일반적으로 시간에 따라 변하는 경우 밀도 ϱ도 시간에 따라 변합니다.
\begin{정렬}
\라벨{b}
&\밑줄{\dot m_\text{CV} =\frac{\partial \rho}{\partial t} \cdot \text{d}V} \\[5px]
\end{정렬}
우리는 시간이 지남에 따라 변하는 단일 밀도가 할당될 수 있는 무한소 체적 요소를 보고 있다는 점에 유의하십시오. 다음 단계에서는 볼륨 요소의 크기가 어쨌든 중요하지 않으므로 실제로 극소량으로 선택할 수 있음을 알 수 있습니다. 또한 흐름의 밀도는 일반적으로 시간이 지남에 따라 변할 뿐만 아니라(예:비정상 흐름) 한 지점에서 다른 지점으로 변합니다(예:파이프 감속기). 따라서 밀도의 시간적 변화는 시간에 따른 밀도 함수의 편도함수입니다.
방정식 (\ref{a})의 방정식 (\ref{b})을 사용하면 질량 유속의 기울기와 흐름의 한 지점에서 결과적인 밀도의 시간적 변화 사이에 다음 관계가 최종적으로 얻어집니다.
\begin{정렬}
\요구{취소}
&\frac{\partial \rho}{\partial t} \cdot \cancel{\text{d}V} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \cancel{\text{d}V} \\[5px]
&\boxed{\frac{\partial \rho}{\partial t} =~- \frac{\partial (\rho v_\text{x})}{\partial x}}~~~\text{1차원 흐름에 대한 연속 방정식} \\[5px]
\end{정렬}
이 방정식은 최종적으로 연속 방정식이라고 불립니다. 1차원 흐름에 대해 이 형식으로 유효합니다. 보시다시피, 이 방정식은 질량 보존의 결과입니다. 연속 방정식은 기존 유동장(질량 플럭스의 벡터로 표시됨)을 통해 유동의 임의 지점에서 밀도의 시간적 변화를 결정하는 데 사용됩니다. 따라서 압축성 유체의 불안정한 흐름이 발생한다는 설명이 가능합니다. 연속 방정식에 따르면 다음 진술이 적용됩니다:
흐름의 한 지점에서 질량 유속의 기울기는 이 지점의 밀도의 시간적 변화에 해당합니다!
질량 유속은 벡터이며 유속과 동일한 방향을 가리킨다는 점에 유의하십시오. 이는 궁극적으로 벡터(속도)와 스칼라(밀도)의 곱이기 때문입니다. 질량유속은 기본적으로 밀도에 의해 가중치가 부여된 유속입니다. 흐름장을 설명하려면 유선형, 경로선, 유맥선 및 타임라인 문서를 참조하세요.
3차원 흐름의 연속 방정식
이전 고려 사항은 x 방향의 1차원 흐름으로 제한되었습니다. 그러나 일반적으로 흐름은 3차원입니다. 즉, 흐름 속도는 세 방향 모두에 구성 요소를 갖습니다. 따라서 x 방향의 체적 요소를 통과하는 질량 흐름을 고려할 수 있을 뿐만 아니라 y 및 z 방향의 흐름 성분도 고려해야 합니다. 질량은 전면과 후면뿐만 아니라 측면(y 방향)과 바닥면과 상단면(z 방향)을 통해서도 볼륨 요소로 유입 및 유출됩니다.
애니메이션:볼륨 요소를 통한 3차원 흐름(컨트롤 볼륨)y 및 z 방향의 경우 제어 볼륨 내부의 질량 변화는 방정식(\ref{a})과 동일한 방식으로 결정될 수 있습니다.
\begin{정렬}
\라벨{aa}
&\dot m_\text{x} =~- \frac{\partial (\rho v_\text{x})}{\partial x} \cdot \text{d}V \\[5px]
\라벨{c}
&\dot m_\text{y} =~- \frac{\partial (\rho v_\text{y})}{\partial y} \cdot \text{d}V \\[5px]
\레이블{d}
&\dot m_\text{z} =~- \frac{\partial (\rho v_\text{z})}{\partial z} \cdot \text{d}V \\[5px]
\end{정렬}
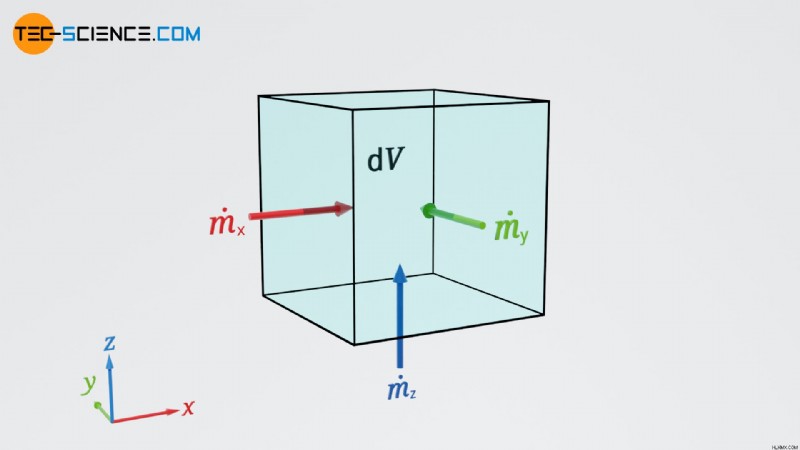 그림:체적 요소 경계를 가로지르는 질량 흐름
그림:체적 요소 경계를 가로지르는 질량 흐름 이 방정식에서 속도 vx, vy 및 vz는 흐름 벡터 v의 구성 요소를 나타냅니다. 극소 제어 볼륨에서 결과적인 질량 변화는 이제 더 이상 x 방향의 흐름뿐만 아니라 y 및 z 방향의 흐름 구성 요소로 인해 발생합니다. 1차원 흐름에 대한 방정식(\ref{b})과 마찬가지로 이제 다음 공식이 3차원 흐름에 적용됩니다.
\begin{정렬}
&\underbrace{\frac{\partial \rho}{\partial t} \cdot \text{d}V}_\text{제어 볼륨 내부의 질량 변화} =\underbrace{\dot m_\text{x}+\dot m_\text{y} +\dot m_\text{z}}_{\text{컨트롤 볼륨의 경계를 넘어 흐르는 질량}} \\[5px]
\end{정렬}
이 방정식에 사용된 방정식 (\ref{aa}) ~ (\ref{d})는 최종적으로 3차원 흐름에 대한 연속 방정식을 제공합니다.
\begin{정렬}
\요구{취소}
&\frac{\partial \rho}{\partial t} \cdot \cancel{\text{d}V}=~- \frac{\partial (\rho v_\text{x})}{\partial x}\cdot \cancel{\text{d}V} – \frac{\partial(\rho v_\text{y})}{\partial y}\cdot \cancel{\text{d}V} – \frac{\partial (\rho v_\text{z})}{\partial z}\cdot \cancel{\text{d}V} \\[5px]
&\boxed{\frac{\partial \rho}{\partial t} =~- \left[\frac{\partial (\rho v_\text{x})}{\partial x}+ \frac{\partial(\rho v_\text{y})}{\partial y}+ \frac{\partial(\rho v_\text{z})}{\partial z}\right]}~~\text{연속방정식} \\[5px]
\end{정렬}
서로 다른 방향에 대한 편미분의 합(질량 플럭스 기울기의 합)을 발산이라고도 합니다. (div) 수학. 발산은 흐름장의 경우 체적 요소를 통해 흐름의 균형을 맞추는 수학 연산자입니다. 발산은 del 연산자 ∇와 질량 플럭스 ϱv의 벡터장의 스칼라 곱으로 작성할 수도 있습니다.
\begin{정렬}
&\boxed{\frac{\partial \rho}{\partial t} =~- \text{div}\left(\rho \vec v \right) }~~\text{where}~~~\text{div}\left(\rho \vec v \right) =\vec \nabla \cdot \rho \vec v =\frac{\partial (\rho v_\text{x})}{\partial x}+ \frac{\partial (\rho v_\text{y})}{\partial y}+ \frac{\partial (\rho v_\text{z})}{\partial z} \\[5px]
\end{정렬}
비압축성 유체의 경우 밀도는 변하지 않으므로 시간이 지나도 일정합니다. 따라서 시간에 대한 밀도의 편도함수는 0입니다(∂ϱ/∂t=0). 또한 밀도도 공간적으로 일정하므로 발산 연산자 앞에 쓸 수 있습니다. 따라서 비압축성 유체의 경우 연속 방정식의 형식은 다음과 같습니다.
\begin{정렬}
&\boxed{\text{div}\left(\vec v \right) =0} ~~\text{비압축성 유체의 연속 방정식} \\[5px]
\end{정렬}
발산의 해석
벡터 필드는 화살표로 시각화될 수 있습니다. 화살표의 길이는 양의 크기를 나타내고 화살촉은 방향을 나타냅니다. 벡터 필드는 필드 라인으로 시각화될 수도 있습니다. 자기력선의 밀도는 자기장 강도의 크기를 나타내고 자기력선의 접선은 방향을 나타냅니다. 비슷한 방식으로 유체의 유동장은 유선형("장선")으로 시각화될 수 있습니다. 유선의 밀도는 유속을 측정한 것이며 유선에 대한 접선은 흐름 방향을 나타냅니다.
아래 그림은 2차원 유동장을 개략적으로 보여줍니다. 싱크대에 물을 붓고 동시에 배수구를 열어 두는 것을 상상할 수 있습니다. 결과적인 속도장은 표시된 흐름장과 단순화된 방식으로 일치합니다.
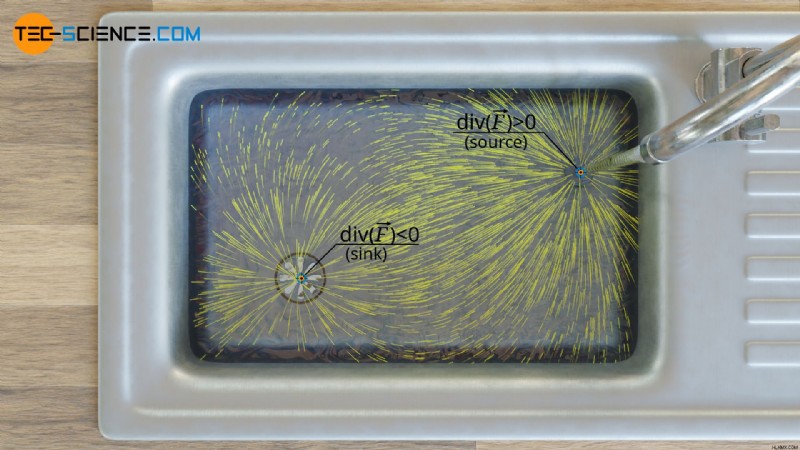 그림:소스 강도를 측정하는 벡터장의 발산
그림:소스 강도를 측정하는 벡터장의 발산 물이 싱크대와 만나는 지점에 수원이 있습니다. . 이 시점에서 물이 생성됩니다. 말하자면 흐름 평면에서(여기서 우리가 보고 있는 것은 2차원 사례이지, 분명히 물이 무에서 생성될 수 없는 3차원 사례가 아니라는 점에 유의하십시오). 배수구가 있는 지점에서는 2차원적인 관점에서 물이 사라진다. 이 시점에서 흐름면의 물은 소멸됩니다. , 말하자면.
이 벡터 필드에 발산 연산자를 적용하면 물이 생성되는 지점에서 양수 값을 얻게 됩니다. . 물이 절멸되는 지점에서 , 음수 값을 얻게 됩니다. 벡터 필드에 발산 연산자를 적용하면 소스 를 시각화할 수 있습니다. 그리고 가라앉다 생생한 방식으로 벡터 필드를 구현합니다. 자기장 선 또는 흐름 선은 양의 발산 지점(소스)에서 시작하고 음의 발산 지점(싱크)에서 끝납니다. 자기장 선이나 유선이 소스나 싱크에서 강하게 갈라진다는 사실이 최종적으로 연산자 이름을 붙인 이유입니다.
발산 연산자는 벡터장을 스칼라 장으로 변환하며 스칼라 양은 장 소스의 강도를 측정하는 척도입니다! 양수 값은 소스를 나타내고 음수 값은 필드 라인의 싱크를 나타냅니다!
위에 표시된 흐름장 대신 두 개의 전하를 상상할 수도 있습니다. 결과 필드 라인은 매우 유사해 보입니다. 실제로 소스의 강도를 측정하는 발산(전하 측정)도 이 분야에서 중요한 역할을 합니다. 따라서 발산 연산자는 많은 벡터 필드에서 매우 중요합니다.
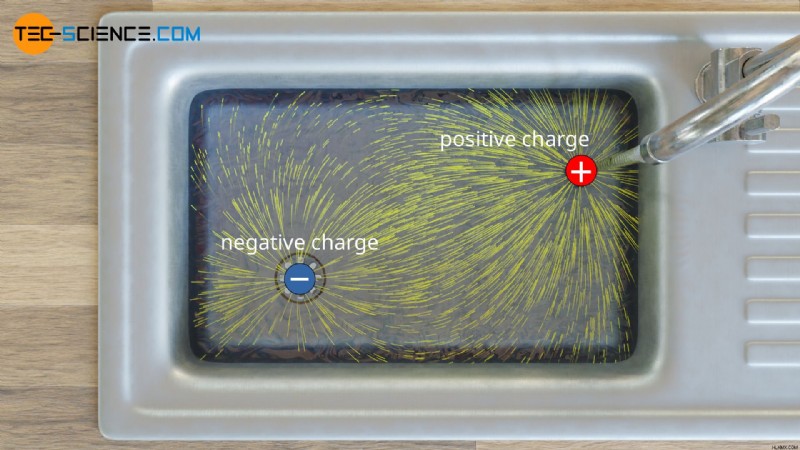 그림:전기장의 자력선 이미지
그림:전기장의 자력선 이미지 그러나 소스나 싱크가 없어 소스가 없는 벡터 필드도 있습니다. . 예를 들어, 자기력선에는 시작도 끝도 없지만 항상 닫혀 있는 자기장이 포함됩니다. 비압축성 흐름조차도 질량이 생성되거나 소멸될 수 없다는 사실로 인해 소스가 없음이 분명합니다(참고:위의 2D 흐름장의 예는 예시일 뿐임).