이 기사에서 우리는 유선형과 이에 수직인 유체 요소의 운동 방정식을 유도합니다.
소개
다음에서 우리는 평면의 유선형, 즉 층류(2차원 흐름)에서 유체 요소의 운동 방정식을 유도하고자 합니다. 예를 들어 위에서 보면 곡선의 깊은 수로의 흐름을 상상할 수 있습니다. 우리는 유선 방향으로 흐르는 지구 표면과 평행한 수평면에 고정 좌표계 s를 정의합니다. 유선형의 곡률 반경은 rc로 표시됩니다.
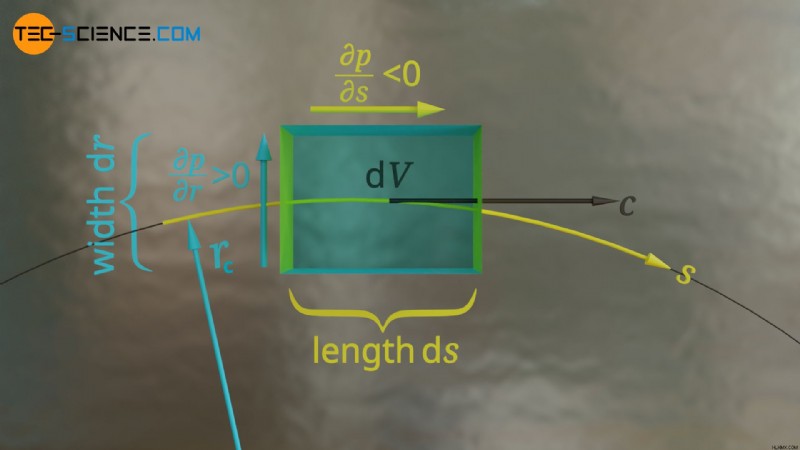 그림:곡선 유선형의 유체 요소
그림:곡선 유선형의 유체 요소 유체 요소는 반경 방향의 폭 dr과 유선 방향의 길이 ds를 갖습니다. 유선 방향의 압력 구배는 ∂p/∂s<0이고 반경 방향의 압력 구배는 ∂p/∂r>0입니다. 부피가 dV인 유체 요소는 유선 위에서 속도 c로 움직입니다.
유체 요소의 유선 방향 운동 방정식
실질적인 가속
첫째, 우리는 유선 방향으로만 유체 요소의 동역학을 고려합니다. 정의에 따르면, 유체 요소는 유선에 접하는 속도 c로 움직입니다. 그러나 비정상 흐름의 경우 유속 c는 장소에 따라 달라질 뿐만 아니라 고정된 위치(예:흐름이 "시작"될 때)에서 시간이 지남에 따라 변경되므로 유체 요소의 가속도는 기본적으로 두 부분으로 구성됩니다.
- 속도의 시간적 변화 고정된 위치에서(지역 가속도 ) 그리고
- 장소 간 속도의 공간적 변화(대류 가속도 ).
첫 번째 부분은 고정된 위치에서 속도의 모든 시간적 변화가 가속도를 나타낸다는 사실에서 비롯됩니다. 즉, 유체 요소의 속도가 고정된 위치에서 변하는 경우 이는 각 가속도의 결과일 수 있습니다. 두 번째 부분은 속도가 고정된 위치에서 시간에 따라 변할 뿐만 아니라 특정 시점에서 장소에 따라 속도가 다르다는 사실에 기인합니다. 이는 유체 요소가 위치가 변경되면 새로운 유속으로 가속되어야 함을 의미합니다. 두 부분 모두 소위 실질적인 가속화를 나타냅니다. , 즉 유체 요소 전체에 실제로 작용하는 가속도(재료 가속도라고도 함) ).
따라서 속도 dc의 실질적인 변화는 시간 dt 내에서 속도 ∂c/∂t의 시간적 변화와 거리 ds 내에서 속도 ∂c/∂s(구배)의 공간적 변화에 의해 획득됩니다.
\begin{정렬}
&\underbrace{\text{d}c}_{\text{상당한 변화}} =\underbrace{\frac{\partial c}{\partial t} \text{d}t}_{\text{지역 변화}} + \underbrace{\frac{\partial c}{\partial s} \text{d}s}_{\text{대류 변화}}\\[5px]
\end{정렬}
이 방정식을 시간 dt로 나누면 유선의 접선 방향에서의 실질적인 가속도에 대한 다음 공식이 얻어집니다.
\begin{정렬}
&a_t =\frac{\text{d}c}{\text{d}t} =\frac{\partial c}{\partial t} + \frac{\partial c}{\partial s} \underbrace{\frac{\text{d}s}{\text{d}t}}_{c}\\[5px]
&\underline{a_t =\frac{\partial c}{\partial t} + c\frac{\partial c}{\partial s}} \\[5px]
\end{정렬}
대류 가속도의 항은 유속에 따라 달라집니다. 이는 또한 유체 요소가 매우 빠르게 흐르면 특정 시간 내에 비교적 먼 거리를 이동하기 때문에 분명합니다. 주어진 속도 구배 ∂c/∂s에 대해 이는 그에 상응하는 속도 변화가 크고 가속도도 크다는 것을 의미합니다.
따라서 다음과 같은 가속 접선력 Ft는 고려되는 질량 dm의 유체 요소에 유선 방향으로 작용하며, 이에 따라 질량은 유체 요소 dV의 부피와 밀도 ϱ로 표현될 수 있습니다.
\begin{정렬}
\레이블{t}
&\boxed{F_t =\text{d}m \cdot a_t =\text{d}V \cdot \rho \cdot \left( \frac{\partial c}{\partial t} + c\frac{\partial c}{\partial s}\right)} ~~~~\text{접선력 가속} \\[5px]
\end{정렬}
압력
상위 방정식은 가속도(운동학)에 대한 속도의 국부적 및 시간적 변화의 효과만 설명하고 이 가속도(운동학)의 원인은 설명하지 않습니다. 가속력의 원인은 유체 요소에 작용하는 힘입니다. 그러므로 우리는 유체 요소에 작용하는 힘을 자세히 살펴보고 균형을 맞춰야 합니다. 여기서도 유선 방향의 운동이나 힘만 고려하겠습니다.
힘은 거기에 작용하는 압력으로 인해 유체 요소의 끝면에 작용하며, 유선을 따라 감소합니다. 유체 입자는 압력이 감소하는 방향으로만 이동할 수 있다는 점에 유의하십시오. 왜냐하면 감소하는 압력 구배 ∂p/∂s<0이 처음에 흐름을 유도하는 것이기 때문입니다. 따라서 압력 p가 왼쪽 끝 dAs에 작용하면 오른쪽 끝(거리 ds 이상)에는 p+∂p/∂s⋅ds만큼 낮은 압력이 있습니다.
\begin{정렬}
&\underline{F_{p1} =p \cdot \text{d}A_s} \\[5px]
&\밑줄{F_{p2} =\left(p+\frac{\partial p}{\partial s}\cdot \text{d}s \right) \cdot \text{d}A_s} \\[5px]
\end{정렬}
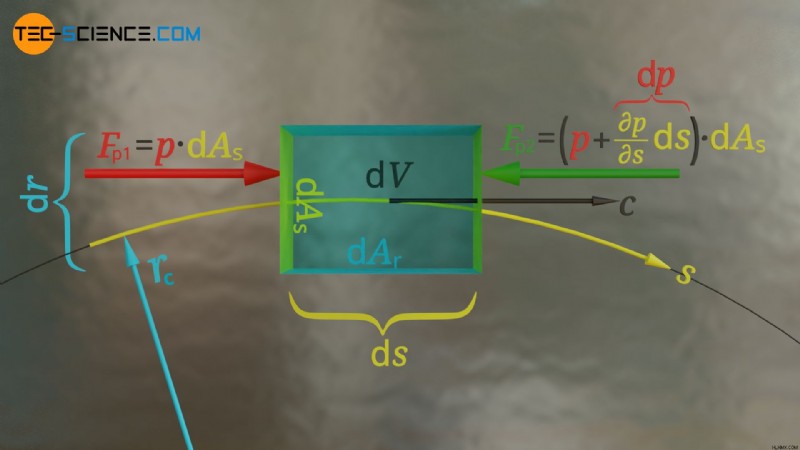 그림:유체 요소의 끝면에 작용하는 압력력
그림:유체 요소의 끝면에 작용하는 압력력 유체 요소 Fp에 작용하는 결과적인 압력 힘은 최종적으로 두 힘의 차이로 인해 발생합니다.
\begin{정렬}
\요구{취소}
F_p &=F_{p1} – F_{p2} \\[5px]
&=p \cdot \text{d}A_s – \left(p+\frac{\partial p}{\partial s}\cdot \text{d}s \right) \cdot \text{d}A_s \\[5px]
&=\cancel{p \cdot \text{d}A_s} – \cancel{p \cdot \text{d}A_s} – \frac{\partial p}{\partial s}\cdot \underbrace{\text{d}s \cdot \text{d}A_s}_{\text{d}V} \\[5px]
\end{정렬}
\begin{정렬}
\boxed{F_p =– \frac{\partial p}{\partial s}\cdot \text{d}V}~~~~~\text{합성 압력} \\[5px]
\end{정렬}
마찰력
또한, 유체의 동점도 θ로 인해 측면에 마찰력이 작용합니다. 이는 뉴턴의 유체 마찰 법칙을 사용하여 결정할 수 있습니다.
\begin{정렬}
\레이블{n}
&\tau=\eta \cdot \frac{\partial c}{\partial r} \\[5px]
\end{정렬}
이 방정식에서 τ는 표면에 작용하는 전단 응력을 나타내며, 이는 반경 속도 구배 ∂c/∂r에 비례합니다. 이 속도 기울기는 유선에 수직인 속도의 공간적 변화를 나타냅니다. 그러나 유체 요소의 폭 dr에 걸쳐 이 속도 구배는 일반적으로 변경됩니다. 따라서 양쪽에 서로 다른 전단 응력이 작용합니다.
∂τ/∂r이 반경 방향의 전단 응력 변화(전단 응력 구배)를 나타내는 경우 dr의 유체 요소의 주어진 폭에 대해 전단 응력은 ∂τ/∂r⋅dr 양만큼 변경됩니다. 따라서 측면으로 작용하는 전단력의 경우 다음 공식이 적용됩니다:
\begin{정렬}
&F_{f1} =\tau \cdot \text{d}A_r \\[5px]
&F_{f2} =\left(\tau+ \frac{\partial \tau}{\partial r}\text{d}r\right) \cdot \text{d}A_r \\[5px]
\end{정렬}
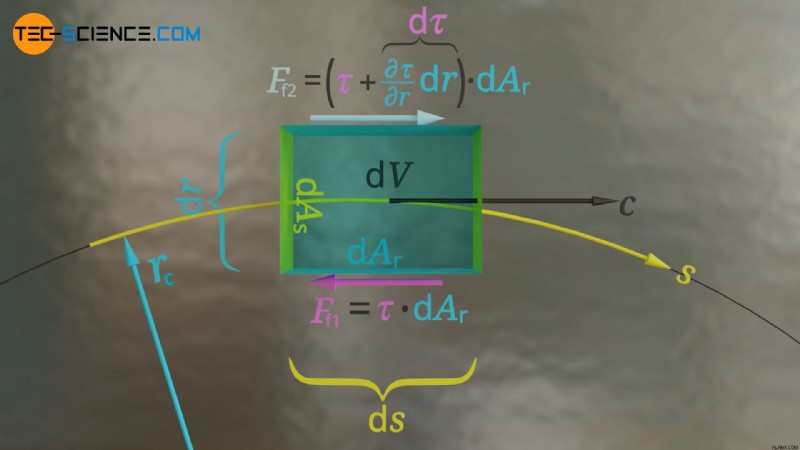 그림:유체 요소의 측면에 작용하는 마찰력
그림:유체 요소의 측면에 작용하는 마찰력 측면으로 작용하는 힘은 서로 다른 방향을 가리키고 있다는 점에 유의하십시오. 반경 방향으로 유속이 증가한다고 가정하면 오른쪽(유동 방향에서 볼 때)의 주변 유체는 유체 요소보다 낮은 속도로 흐릅니다. 말하자면 유체 요소의 속도가 느려지고 그에 따라 힘이 흐름 방향에 반대됩니다. 반대편 왼쪽에서는 주변 유체가 유체 요소보다 빠르게 흐릅니다. 주변 유체는 말하자면 유체 요소를 따라 "끌어당기"려고 하며 따라서 힘은 흐름 방향으로 작용합니다.
이때 상위 방정식에서 발생하는 전단응력을 방정식(\ref{n})에 따라 뉴턴의 마찰법칙으로 표현하면 횡방향으로 작용하는 전단력(마찰력)에 대해 다음 관계식을 얻을 수 있습니다.
\begin{정렬}
&\밑줄{F_{f1} =\eta \cdot \frac{\partial c}{\partial r} \cdot \text{d}A_r} \\[5px]
\end{정렬}
\begin{정렬}
F_{f2} &=\left(\eta \cdot \frac{\partial c}{\partial r}+ \frac{\partial}{\partial r}\left(\eta \cdot \frac{\partial c}{\partial r}\right) \text{d}r\right)\cdot \text{d}A_r \\[5px]
&=\left(\eta \cdot \frac{\partial c}{\partial r}+ \eta \cdot \frac{\partial}{\partial r}\left(\frac{\partial c}{\partial r}\right) \text{d}r\right)\cdot \text{d}A_r \\[5px]
\end{정렬}
\begin{정렬}
&\밑줄{F_{f2}=\eta \left(\frac{\partial c}{\partial r}+ \frac{\partial^2 c}{\partial r^2}~\text{d}r\right) \cdot \text{d}A_r} \\[5px]
\end{정렬}
이제 유체 요소에 작용하는 모든 마찰력이 수학적으로 설명됩니다. 평면 흐름(공간적으로 일정한 속도)에서 수직 방향의 속도 구배가 없기 때문에 고려되는 수평 평면(즉, 유체 요소의 상단 및 하단)에 수직으로 작용하는 마찰력이 없다는 점에 유의하십시오. 그리고 속도 구배가 없으면 뉴턴의 마찰 법칙에 따르면 마찰이 없습니다. 이는 유체층의 속도가 수직 방향에서 동일하면 서로 상대적으로 움직이지 않고 따라서 마찰력을 생성하거나 운동량 전달을 일으키지 않기 때문에 이는 또한 분명합니다.
유체 요소에 작용하는 결과적인 마찰력 Ff는 궁극적으로 두 반대 힘 간의 차이로 인해 발생합니다.
\begin{정렬}
\요구{취소}
F_{f} &=F_{f2} – F_{f1} \\[5px]
&=\eta \left(\frac{\partial c}{\partial r}+ \frac{\partial^2 c}{\partial r^2}~\text{d}r\right) \cdot \text{d}A_r – \eta \cdot \frac{\partial c}{\partial r} \cdot \text{d}A_r\\[5px]
&=\취소{\eta \cdot \frac{\partial c}{\partial r}\cdot \text{d}A_r}+\eta \frac{\partial^2 c}{\partial r^2}~\underbrace{\text{d}r \cdot \text{d}A_r}_{\text{d}V}-\cancel{ \eta \cdot \frac{\partial c}{\partial r} \cdot \text{d}A_r}\\[5px]
\end{정렬}
\begin{정렬}
&\boxed{F_f=\eta \frac{\partial^2 c}{\partial r^2}~\text{d}V} ~~~~~\text{합성 마찰력}\\[5px]
\end{정렬}
힘의 균형
앞면에 작용하는 압력 Fp와 측면에 작용하는 마찰력 Ff로 구성된 유체 요소에 작용하는 힘의 합은 최종적으로 방정식(\ref{t})에 따라 가속 접선력에 해당합니다.
\begin{정렬}
\요구{취소}
&F_{t} =F_{f} + F_{p} \\[5px]
&\취소{\text{d}V} \cdot \rho \cdot \left( \frac{\partial c}{\partial t} + c\frac{\partial c}{\partial s}\right) =\eta \frac{\partial^2 c}{\partial r^2}~\cancel{\text{d}V} – \frac{\partial p}{\partial s}\cdot \취소{\text{d}V} \\[5px]
&\frac{\partial c}{\partial t} + c\frac{\partial c}{\partial s}=\underbrace{\frac{\eta}{\rho}}_{\nu} \frac{\partial^2 c}{\partial r^2} – \frac{1}{\rho}\frac{\partial p}{\partial s} \\[5px]
&\boxed{\frac{\partial c}{\partial t} + c\frac{\partial c}{\partial s}=\nu \frac{\partial^2 c}{\partial r^2} – \frac{1}{\rho}\frac{\partial p}{\partial s}} ~~~~\text{수평면의 유선 방정식}\\[5px]
\end{정렬}
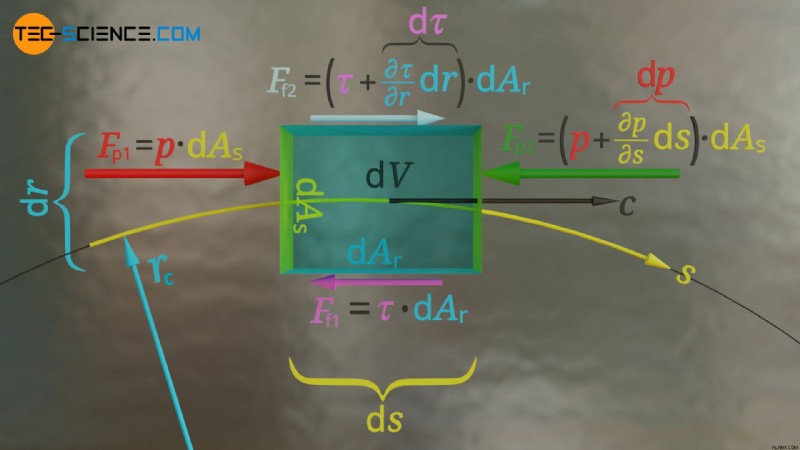 그림:유선형의 유체 요소 운동 방정식 유도
그림:유선형의 유체 요소 운동 방정식 유도 유선형 방정식을 도출할 때 동적 점도와 밀도의 몫이 동점도 ν(그리스 소문자 Nu)에 해당한다는 것이 사용되었습니다. 이 방정식은 중력이 흐름 평면(수평면)에 수직으로 작용하는 평면 흐름에만 적용됩니다.
그러나 수직면에서 흐름을 고려하는 경우 유선 방향을 가리키는 중량력의 구성 요소도 고려해야 합니다. 그러면 유선 방정식에 추가 항이 나타납니다.
\begin{정렬}
\라벨{오일러}
&\boxed{\frac{\partial c}{\partial t} + c\frac{\partial c}{\partial s}=\nu \frac{\partial^2 c}{\partial r^2} – \frac{1}{\rho}\frac{\partial p}{\partial s}-g\frac{\partial z}{\partial s}} ~~~~\text{수직의 유선형 방정식 비행기}\\[5px]
\end{정렬}
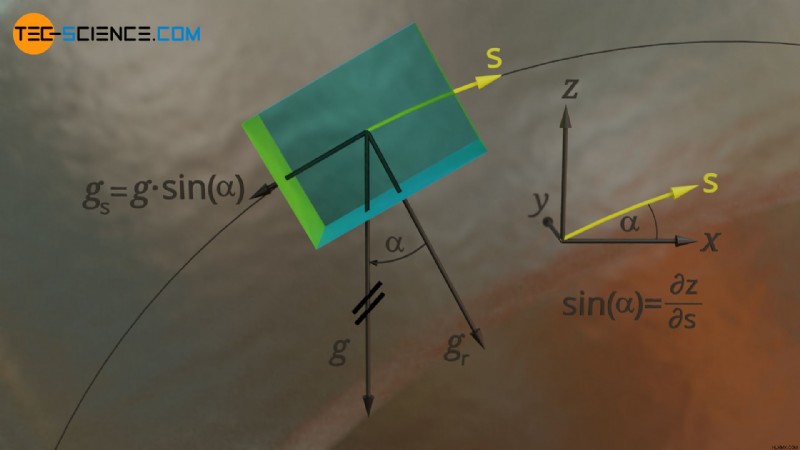 그림:중력을 고려한 유선형 유체 요소의 운동 방정식
그림:중력을 고려한 유선형 유체 요소의 운동 방정식 ∂z/∂s 항은 궁극적으로 수직축(z축)과 유선 방향(∂z/∂s=sin(α)) 사이의 각도의 사인에 해당합니다. 따라서 위 방정식의 항은 g⋅sin(α)로 쓸 수도 있습니다. 이제 이 항이 유선 방향의 중량력 성분에 해당한다는 것이 분명해졌습니다.
그러나 수평 흐름의 경우 분명히 유선 방향에는 가중치 구성 요소가 없으므로 이 항은 사라집니다. 정의에 따라 흐름 속도가 시간에 따라 변하지 않는 정상 흐름을 고려하면 두 방정식 모두 더욱 단순화됩니다. 따라서 속도의 시간 미분은 0입니다:∂c/∂t=0(국소 가속도 없음, 대류 가속도만)!
방정식(\ref{euler})은 실제로 점도 항에 의해 확장된 오일러 방정식의 특별한 경우입니다.
유선에 수직인 유체 요소의 운동 방정식
이 섹션에서는 유체 요소와 유선에 수직으로 작용하는 힘을 고려합니다. 단순화를 위해 우리는 안정된 흐름을 가정합니다. 곡선 유선형은 곡률 반경이 rc인 호 단면으로 볼 수 있습니다. 이러한 원형 경로를 생성하려면 반경 방향으로 작용하는 힘이 구심력 Fc를 생성해야 합니다. 적용되는 구심력의 크기는 유속 c, 곡률 반경 rc 및 유체 요소 dm의 질량에 따라 달라집니다.
\begin{정렬}
&\boxed{F_c =\frac{\text{d}m \cdot c^2}{r_c}} ~~~~\text{적용할 구심력} \\[5px]
\end{정렬}
이 지점에서 유체 요소 면의 마찰력을 무시하면 구심력의 원인은 단 하나뿐입니다. 즉, 유체 요소 측면의 압력이 달라야 반경 방향에 대해 구심력이 발생합니다. 따라서 반경 방향의 압력은 유체 요소의 폭에 걸쳐 증가해야 합니다. 이 반경 방향 압력 구배 ∂p/∂r이 의존하는 양은 다음과 같습니다.
압력은 반경 방향 유선형에 수직으로 증가합니다!
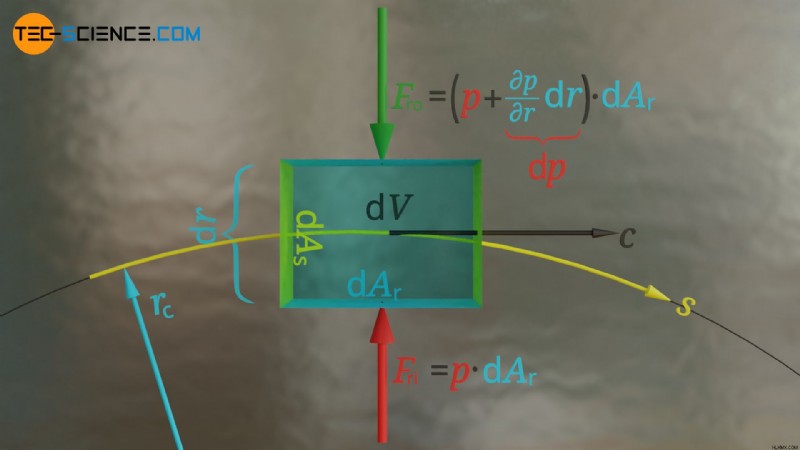 그림:구심력의 결과로 유선에 수직인 압력 구배 도출
그림:구심력의 결과로 유선에 수직인 압력 구배 도출 압력 p가 유체 요소의 "내부"(내부 )에 작용하는 경우 곡선과 관련하여) 주어진 압력 구배 ∂p/∂r>0에 대해 ∂p/∂r⋅dr만큼 낮은 압력은 유체 요소의 "외부"에 발생합니다. 그 결과 다음과 같은 방사형 힘이 발생합니다:
\begin{정렬}
&\underline{F_{ri} =p \cdot \text{d}A_r} \\[5px]
&\underline{F_{ro} =\left(p+\frac{\partial p}{\partial r}\cdot \text{d}r \right) \cdot \text{d}A_r} \\[5px]
\end{정렬}
반경 방향 Fr의 합성 압력 크기는 최종적으로 두 힘의 차이로 인해 발생합니다.
\begin{정렬}
\요구{취소}
F_r &=F_{ro} – F_{ri} \\[5px]
&=\left(p+\frac{\partial p}{\partial r}\cdot \text{d}r \right) \cdot \text{d}A_r – p \cdot \text{d}A_r \\[5px]
&=\cancel{p \cdot \text{d}A_r} + \frac{\partial p}{\partial r}\cdot \underbrace{\text{d}r \cdot \text{d}A_r}_{\text{d}V}- \cancel{p \cdot \text{d}A_r}\\[5px]
\end{정렬}
\begin{정렬}
\boxed{F_r =\frac{\partial p}{\partial r}\cdot \text{d}V}~~~~~\text{합력 방사력} \\[5px]
\end{정렬}
반경 방향의 결과적인 압력이 구심력의 원인입니다. 두 방정식을 동일시하면 최종적으로 유체 흐름과 결과적으로 반경 방향의 압력 구배 사이에 다음과 같은 관계가 제공됩니다.
\begin{정렬}
&F_r =F_c \\[5px]
&\frac{\partial p}{\partial r}\cdot \text{d}V =\frac{\text{d}m \cdot c^2}{r_K} \\[5px]
&\frac{\partial p}{\partial r}=\frac{\overbrace{\frac{\text{d}m}{\text{d}V}}^{\rho} \cdot c^2}{r_K} \\[5px]
&\boxed{\frac{\partial p}{\partial r}=\frac{\rho \cdot c^2}{r_K}} \\[5px]
\end{정렬}
유속이 높을수록, 유체의 밀도가 높을수록, 유선의 곡률 반경이 작을수록 반경 방향의 압력 구배는 커집니다!
그러나 위의 방정식은 곡률 반경이 클수록 반경 방향 압력 구배가 점점 작아진다는 것을 보여줍니다. 곡률 반경이 무한히 큰 직선 유선형의 경우 압력 구배는 무한히 작습니다. 즉, 직선 유선형의 경우 반경 방향으로 압력 구배가 없습니다.
따라서 파이프의 압력 측정은 항상 직선 유선형의 직선 파이프 섹션에서 수행되어야 합니다. 이러한 경우 측정된 압력은 파이프 둘레의 압력 게이지 위치와 무관합니다. 반면, 파이프 각도에서 압력을 측정하는 경우 압력은 곡률 중심으로부터의 거리, 즉 파이프 원주에서의 위치에 따라 달라집니다.
 그림:파이프 시스템의 압력 측정
그림:파이프 시스템의 압력 측정